Робота учат понимать динамику и возможности взаимодействия с различными ткаными материалами. В отличие от "привычных" для промышленных роботов твердых предметов, ткани могут свободно болтаться, что усложняет для робота задачу распознования - что за предмет он держит в манипуляторе?
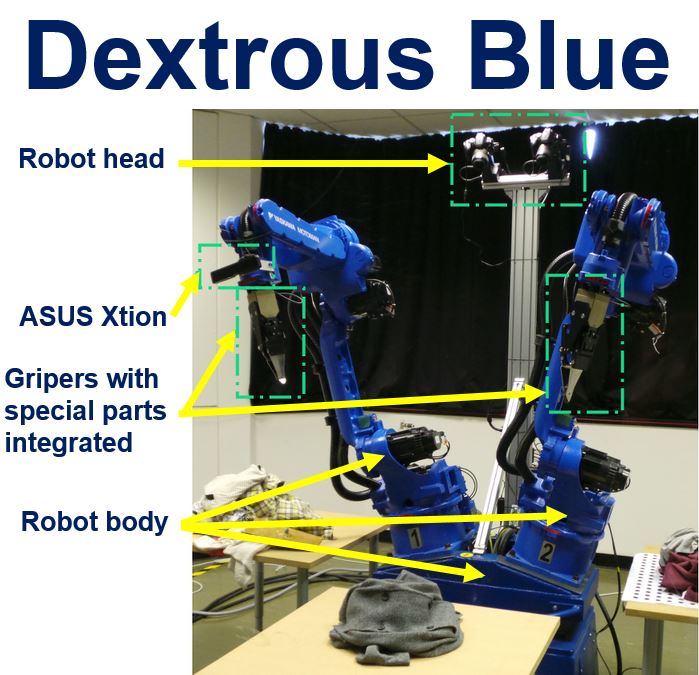
В голове робота - две камеры Nikon DSLR (D5100), обеспечивающие ему два потока информации с разрешением 16 мпикс. Камеры установлены на платформах PTU-D46 с возможностью наклона и панорамирования с соответствующими контроллерами. Расстояние между объективами камер выбрано таким, чтобы обеспечить формирование оптимальной стерео-картинки. Робот "смотрит" на рабочее пространство сверху, система искуственного зрения формирует трехмерное "облако точек", составляющих объект, который робот должен распознать.
В распознавании также задействованы акустические сенсоры в манипуляторах робота. Одежда из разных тканей издает различные звуки, пока робот вертит их в руках. Эта информация используется системой распознавания наряду с полученной от камер.
Проект CloReMa - это сокращение от Clothes Perception and Manipulation. Распознавание и манипуляция предметами одежды.
На видео показан процесс сортировки белья "из кучи" на темное, белое и цветное.
Выглядит процесс неплохо, вот только в реальности робот пока что работает втрое медленнее, чем показано на видео. С другой стороны, он не отдыхает и не спит, так что возможно это все равно хорошее решение. По крайней мере потенциально.
++
Энциклопедия роботов на MForum.ru
Новости роботов на Facebook.com
источник: marketbusinessnews.com
++